Collision Avoidance LED Status
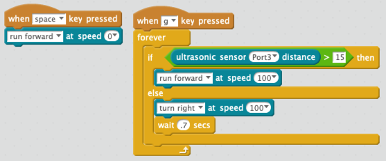
Take the collision avoidance lab and when it senses and object in front of it, make it drive in reverse for a second before it randomly turns. Update the LED colors to show the state of the car:
- Green - driving forward with nothing in front of the robot.
- Red - Sense an object in front of the robot
- Yellow - Driving in reverse
- Purple - randomly turning