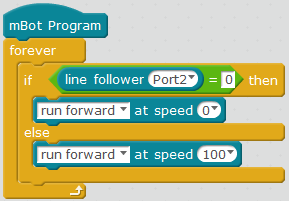
Cliff Detection In this lab, our goal is to create a program that keeps the robot from driving off the end of a table.